




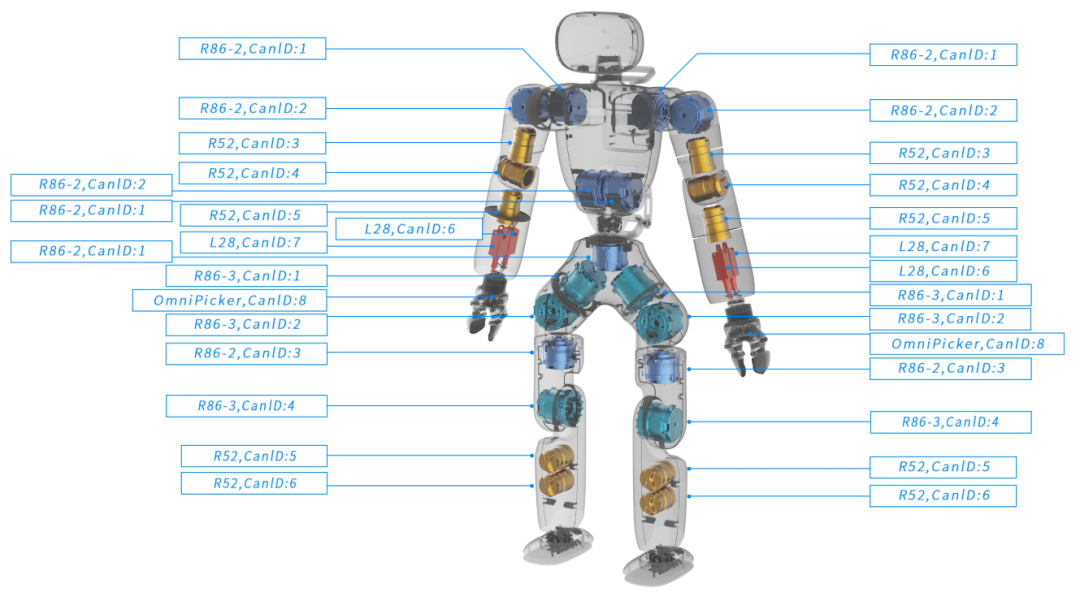
今天要跟各人分享的是时下最热点的呆板人行业,当宇树呆板人站于央视舞台,进入各行各业,流水线工场早已经是主动化;当国之重器表态93年夜阅兵,利与弊仍旧于被人们群情着,科技依然天天前进,行业依然向前成长,对于在一个嵌入式行业开发者来讲,更是一场技能盛宴。拥抱吧!想要从事呆板人行业,没关系随着我一步步的接近,如下是智元呆板人-灵犀X1的外不雅与主体、骨架布局。乍一看外壳、机电、传感器,看不见的有cpu、集成的各种软件算法。
 1、开源代码
1、开源代码
路径:https://www.zhiyuan-robot.com/DOCS/OS/X1-PDG
源码布局: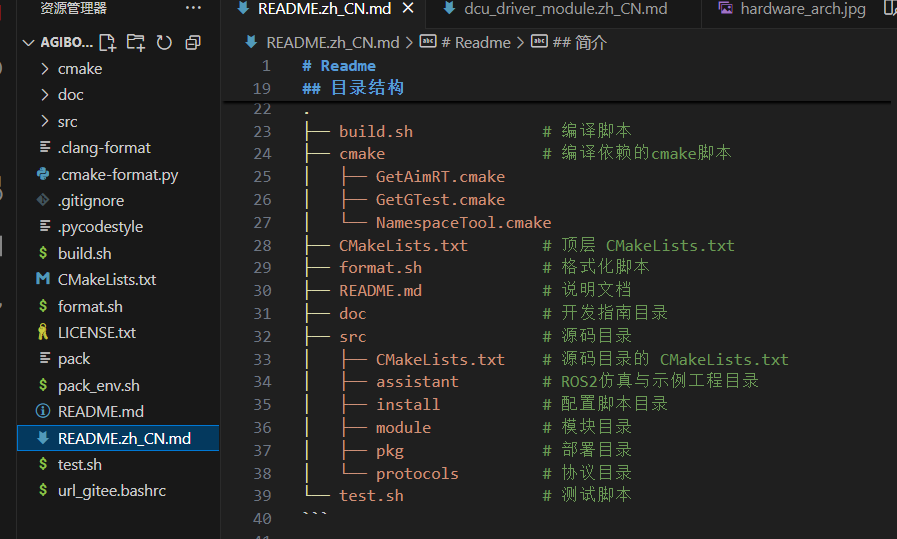
详细的操作步调就于这个文件申明里README.zh_CN.md,根目次下doc文件夹有各模块申明文档
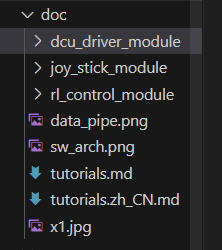 dcu_driver_module:驱动节制单位模块,卖力呆板人底层硬件(如枢纽关头、机电等)的驱动与节制,处置惩罚硬件的指令交互、状况反馈。joy_stick_module:把持杆节制模块,用在经由过程手柄等外设对于呆板人举行手动操控,将手柄输入转换为呆板人的动作指令。rl_control_module:强化进修节制模块(“rl” 为 Reinforcement Learning 缩写),基在强化进修算法,让呆板人经由过程 “试错 - 进修” 自立优化节制计谋。 官方资料:
dcu_driver_module:驱动节制单位模块,卖力呆板人底层硬件(如枢纽关头、机电等)的驱动与节制,处置惩罚硬件的指令交互、状况反馈。joy_stick_module:把持杆节制模块,用在经由过程手柄等外设对于呆板人举行手动操控,将手柄输入转换为呆板人的动作指令。rl_control_module:强化进修节制模块(“rl” 为 Reinforcement Learning 缩写),基在强化进修算法,让呆板人经由过程 “试错 - 进修” 自立优化节制计谋。 官方资料: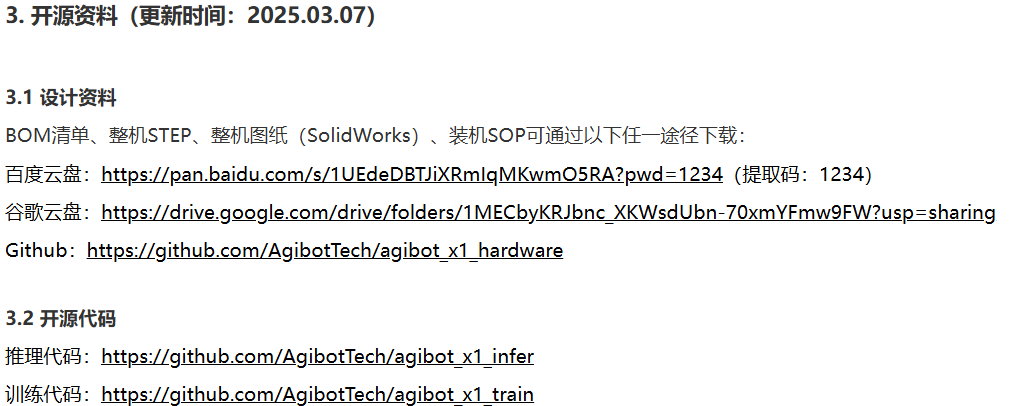
从事具身智能研发,需要把握“底层硬件交互+中层感知节制+上层智能决议计划”的全链路技能能力,这些技能基础彼此支撑,终极实现呆板人于物理世界中“感知情况、计划动作、完成使命”的焦点方针。如下从6个焦点维度,拆解具身智能必备的技能基础,联合灵犀X1详细申明:
2、呆板人硬件与嵌入式基础:解决“物理载体”问题 具身智能的焦点是“怀孕体的智能”,必需先理解呆板人的硬件组成与底层驱动逻辑,不然没法实现“智能”到“动作”的落地。 •焦点内容: a.呆板人硬件架构:理解机械布局(如灵犀X1的枢纽关头、躯干自由度)、履行器(机电、舵机)、传感器(摄像头、激光雷达、IMU惯性丈量单位)的道理与选型; b.嵌入式开发:把握嵌入式芯片(如STM3二、NVIDIA Jetson系列)的编程,能编写驱动步伐(对于应灵犀X1开源代码中的dcu_driver_module),实现“上层指令→底层硬件动作”的转化; c.硬件调试:能排查传感器数据异样、机电卡顿等问题,好比校准IMU的姿态偏差,确保呆板人运动精度。 3、感知技能:解决“看懂世界”问题 具身智能需要经由过程传感器“感知情况”,才能做出合理决议计划——好比呆板人要先辨认“桌子上的杯子”,再计划“拿起杯子”的动作。 •焦点内容: a.计较机视觉(CV): 基础使命:方针检测(如用YOLO辨认物体)、语义支解(区别“桌子”“杯子”等差别种别)、深度预计(用双目相机/ DepthAI获取物体间隔,对于应灵犀X1的视觉模块); 东西与框架:纯熟利用OpenCV(图象处置惩罚)、PyTorch/TensorFlow(练习视觉模子)、PCL(点云处置惩罚,适配激光雷达数据); a.多传感器交融: 因为单一传感器有局限(如摄像头怕遮挡、激光雷达怕强光),需要用算法交融多源数据——好比用卡尔曼滤波、粒子滤波,将IMU的姿态数据与视觉的位置数据联合,晋升呆板人的定位精度。 4、节制与运动计划:解决“精准动作”问题 感知到情况后,呆板人需要“计划运动路径+节制枢纽关头动作”,好比灵犀X1要从“站立”到“哈腰捡工具”,需计较每一个枢纽关头的动弹角度与速率。 •焦点内容: a.运动学与动力学: 运动学:计较呆板人“枢纽关头角度→结尾位置”(正运动学)、“结尾方针位置→枢纽关头角度”(逆运动学,是机械臂/人形呆板人动作节制的焦点); 动力学:思量重力、磨擦力等物理力的影响,用牛顿-欧拉方程、拉格朗日方程建模,防止呆板人运动时“枢纽关头使劲过猛”或者“晃动”; a.运动计划算法: 路径计划:于繁杂情况中找“无碰撞路径”,如A*、RRT *算法(好比灵犀X1避开障碍物走到桌子前); 轨迹优化:将路径转化为光滑的枢纽关头运动轨迹(如用三次样条插值),防止枢纽关头急刹急转; a.节制算法: 基础节制:PID节制(最经常使用,好比节制机电转速不变于方针值); 进阶节制:针对于非线性场景(如呆板人负载变化),用自顺应节制、滑模节制,甚至联合强化进修的“智能节制”(对于应灵犀X1的rl_control_module)。 5、人工智能(AI)与呆板进修:解决“自立决议计划”问题 具身智能的“智能”焦点来自AI——不仅能完成预设动作,还有能经由过程进修优化计谋(好比“屡次拿杯子后,逐渐削减手抖”)。 •焦点内容: a.强化进修(RL): 焦点逻辑:让呆板人于“试错”中进修(好比拿杯子没拿稳→处罚,拿稳→奖励),经常使用算法如DQN(离散动作)、PPO(持续动作,合适呆板人枢纽关头节制)、TD3(解决摸索与使用均衡); 场景适配:于灵犀X1上,可经由过程RL练习“开门”“倒水”等繁杂使命,对于应开源代码中的rl_control_module; a.模拟进修(IL): 当强化进修“试错成本高”时(好比呆板人怕摔),让呆板人模拟人类操作(如人类示教“拿杯子”动作),经常使用算法如举动克隆(BC)、逆强化进修(IRL); a.年夜模子与具身联合: 用年夜语言模子(LLM)做“使命计划”:好比输入天然语言指令“给我倒一杯水”,LLM拆解为“走到桌子前→拿起杯子→打开水龙头→接水→递给我”的步调; 用视觉-语言模子(VLM,如GPT-4V、SAM)做“多模态理解”:让呆板人联合图象(看到杯子)及文字(“杯子”指令),精准定位方针。 6、软件东西链:解决“高效开发”问题 具身智能开发依靠成熟的东西链,特别是呆板人操作体系(ROS),能年夜幅降低“硬件适配+算法集成”的难度。 •焦点内容: a.呆板人操作体系(ROS/ROS2): 焦点能力:节点通讯(如“感知节点”向“节制节点”发送物体位置)、话题/办事机制(尺度化数据交互)、功效包复用(如用MoveIt!做运动计划,直接适配灵犀X1的机械布局); 实疆场景:于ROS中集成joy_stick_module(把持杆节制)、dcu_driver_module(驱动),实现“手柄操控呆板人挪动”的基础功效; a.编程与开发情况: 语言:C++(底层驱动、高机能节制)、Python(算法原型、数据阐发); 体系:Linux(ROS、嵌入式开发的主流情况); 仿真东西:Gazebo、Webots(于虚拟情况中测试算法,好比先于Gazebo中练习“拿杯子”,再部署到灵犀X1什物,降低毁坏危害); a.开源项目复用: 好比基在灵犀X1的开源代码(https://www.zhiyuan-robot.com/DOCS/OS/X1-PDG),直接复用驱动模块及节制框架,聚焦上层AI算法开发。 7、行业待遇: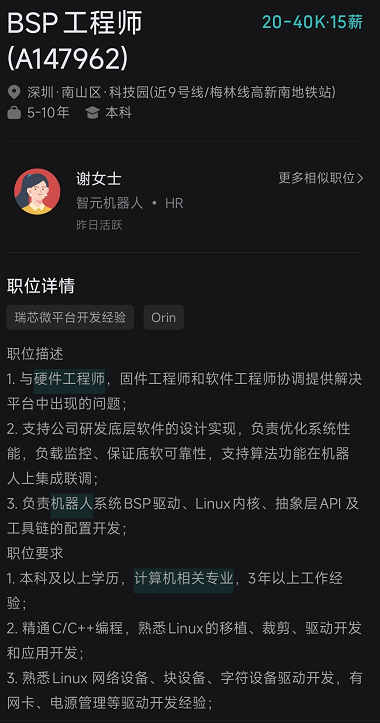
看boss上的雇用信息,行业待遇也还有行,兄弟们,上车吧。
8、增补rk平台资料 “0元购”智元灵犀X1呆板人,软硬件全套图纸及代码全公然!资料免费下载! 10月24日,智元呆板人重磅公布,其自立研发的全栈开源呆板人智元灵犀X1面向全世界开发者正式开源, 发表在 10-25 15:20 名单宣布!【册本评测勾当NO.51】具身智能呆板人体系 | 相识AI的下一个海潮! 试用评测资历!早就听年夜佬们说,具身智能是人工智能的下一海浪潮,也是AI将来的趋向!近来,具身 发表在 11-11 10:20 《具身智能呆板人体系》第1-6章浏览心患上之具身智能呆板人体系配景常识与基础模块 要给AI这个智慧的“脑筋”装上一副“身体”。这个“身体”可所以一部手机,可所以一台主动驾驶汽车。而人形呆板人则是集各种焦点尖端技能在一体的载体,是具身智能的代表产物。与传统的软件 发表在 12-19 22:26 【「具身智能呆板人体系」浏览体验】+初品的体验 《具身智能呆板人体系》 一书由甘一鸣、俞波、万梓燊、刘少山教员配合编写,其封面如图1所示。本书共由5部门构成,其布局及内容如图2所示。 发表在 12-20 19:17 《具身智能呆板人体系》第7-9章浏览心患上之具身智能呆板人与年夜模子 及经验堆集,使呆板人可以或许自立发明工艺纪律,优化功课参数。家庭办事呆板人则采用混淆使命计划计谋:将预练习的基础技术与及时计划相联合,矫捷应答开放情况中的各类环境。第9章深切切磋了元进修于具 发表在 12-24 15:03 【「具身智能呆板人体系」浏览体验】1.全书概览与第一章进修 相识具身智能呆板人相干的常识,我感应十分侥幸及幸运。本书以按部就班的方式睁开,经由过程对于具身 发表在 12-27 14:50 【「具身智能呆板人体系」浏览体验】1.开端理解具身智能书中还有具体先容了撑持具身智能呆板人的焦点技能体系,包括自立呆板人计较体系、感知体系、定位体系和计划及节制体系。本书共分5个部门。 【「具身智能呆板人体系」浏览体验】2.具身智能呆板人年夜模子 最近几年来,人工智能范畴的年夜模子技能于多个标的目的上取患了冲破性的进展,尤其是于呆板人节制范畴揭示出了巨年夜的潜力。于“具身智能 发表在 12-29 23:04 【「具身智能呆板人体系」浏览体验】+两本互为撑持的书 近来于浏览《具身智能呆板人体系》这本书的同时,还有读了 《计较机视觉之PyTorch数字图象处置惩罚》一书,这两本书彻底可以视为是互为依托的姊妹篇。《计较机视觉之PyTorch数字图象处置惩罚》 发表在 01-01 15:50 【「具身智能呆板人体系」浏览体验】2.具身智能呆板人的基础模块 具身智能呆板人的基础模块,这个是本书的第二部门内容,重要分为四个部门:呆板人计较体系,自立呆板人 发表在 01-04 19:22 具身智能于呆板人技能中的成长 具身智能(Embodied Intelligence)于呆板人技能中的成长是人工智能范畴的一个主要趋向。如下是对于
“0元购”智元灵犀X1呆板人,软硬件全套图纸及代码全公然!资料免费下载! 10月24日,智元呆板人重磅公布,其自立研发的全栈开源呆板人智元灵犀X1面向全世界开发者正式开源, 发表在 10-25 15:20 名单宣布!【册本评测勾当NO.51】具身智能呆板人体系 | 相识AI的下一个海潮! 试用评测资历!早就听年夜佬们说,具身智能是人工智能的下一海浪潮,也是AI将来的趋向!近来,具身 发表在 11-11 10:20 《具身智能呆板人体系》第1-6章浏览心患上之具身智能呆板人体系配景常识与基础模块 要给AI这个智慧的“脑筋”装上一副“身体”。这个“身体”可所以一部手机,可所以一台主动驾驶汽车。而人形呆板人则是集各种焦点尖端技能在一体的载体,是具身智能的代表产物。与传统的软件 发表在 12-19 22:26 【「具身智能呆板人体系」浏览体验】+初品的体验 《具身智能呆板人体系》 一书由甘一鸣、俞波、万梓燊、刘少山教员配合编写,其封面如图1所示。本书共由5部门构成,其布局及内容如图2所示。 发表在 12-20 19:17 《具身智能呆板人体系》第7-9章浏览心患上之具身智能呆板人与年夜模子 及经验堆集,使呆板人可以或许自立发明工艺纪律,优化功课参数。家庭办事呆板人则采用混淆使命计划计谋:将预练习的基础技术与及时计划相联合,矫捷应答开放情况中的各类环境。第9章深切切磋了元进修于具 发表在 12-24 15:03 【「具身智能呆板人体系」浏览体验】1.全书概览与第一章进修 相识具身智能呆板人相干的常识,我感应十分侥幸及幸运。本书以按部就班的方式睁开,经由过程对于具身 发表在 12-27 14:50 【「具身智能呆板人体系」浏览体验】1.开端理解具身智能书中还有具体先容了撑持具身智能呆板人的焦点技能体系,包括自立呆板人计较体系、感知体系、定位体系和计划及节制体系。本书共分5个部门。 【「具身智能呆板人体系」浏览体验】2.具身智能呆板人年夜模子 最近几年来,人工智能范畴的年夜模子技能于多个标的目的上取患了冲破性的进展,尤其是于呆板人节制范畴揭示出了巨年夜的潜力。于“具身智能 发表在 12-29 23:04 【「具身智能呆板人体系」浏览体验】+两本互为撑持的书 近来于浏览《具身智能呆板人体系》这本书的同时,还有读了 《计较机视觉之PyTorch数字图象处置惩罚》一书,这两本书彻底可以视为是互为依托的姊妹篇。《计较机视觉之PyTorch数字图象处置惩罚》 发表在 01-01 15:50 【「具身智能呆板人体系」浏览体验】2.具身智能呆板人的基础模块 具身智能呆板人的基础模块,这个是本书的第二部门内容,重要分为四个部门:呆板人计较体系,自立呆板人 发表在 01-04 19:22 具身智能于呆板人技能中的成长 具身智能(Embodied Intelligence)于呆板人技能中的成长是人工智能范畴的一个主要趋向。如下是对于 

 豫公网安备 41072802000523号
豫公网安备 41072802000523号