




传统的使命与运动计划(TAMP)体系于呆板人操作运用中凡是依靠静态模子运行,是以于面临新情况时往往体现欠安。将感知与操作相交融,是应答这一挑战的有用路子,使呆板人可以或许于履行历程中及时更新计划,从而顺应动态变化的场景。
于本期NVIDIA 呆板人研发择要 (R²D²)中,咱们切磋了怎样使用基在感知的 TAMP 以和 GPU 加快的 TAMP 实现长途操作。同时,咱们将先容用在晋升呆板人操作能力的框架,并展示怎样联合视觉与语言信息,将像素转化为子方针、使命负载以和可微分的约束前提。 子方针是较小的阶段性方针,可以或许指导呆板人慢慢告竣终极方针。 Affordance 按照物体或者情况的属性和其所处的上下文,描写呆板人可于其上履行的动作。例如,手柄可被“抓取”,按钮可被“按压”,杯子可被“倾倒”。 于呆板人运动计划中,可微分约束用在确保呆板人的运动满意物理限定,如枢纽关头角度规模、避障要求或者结尾履行器的位置精度,同时仍撑持经由过程进修举行调解。因为这些约束具有可微性,GPU 可以或许于练习或者及时计划历程中高效地计较并优化它们。 使命与运动计划怎样将视觉与语言信息转化为呆板人的详细动作 TAMP 触及确定呆板人应履行的使命以和实现这些使命所需的挪动方式,需要将高层使命计划(即履行甚么使命)与底层运动计划(即怎样挪动以完成使命)相联合。 现代呆板人可以或许联合视觉与语言信息(如图象及指令),将繁杂使命分化为若干较小的步调,即子方针。这些子方针有助在呆板人明确下一步应履行的动作、需要交互的对于象以和怎样实现安全挪动。 该历程使用高级模子将图象及书面指令转化为呆板人可于实际世界中履行的清楚规划。长途操作需要具有布局化用意,且依靠计划职员的有用介入。接下来,咱们将切磋 OWL-TAMP、VLM-TAMP 及 NOD-TAMP 怎样助力解决这一问题: OWL-TAMP:该事情流使呆板人可以或许履行以天然语言描写的繁杂、长视距操作使命,例如“将橙色物体放到桌子上”。OWL-TAMP 是一种混淆式事情流,将视觉语言模子(VLM)与使命与运动计划(TAMP)相联合。此中,VLM 按照开放世界语言(OWL)指令天生约束前提,描写呆板人动作空间中的操作要求。这些约束被整合进 TAMP 体系,并经由过程仿真反馈机制验证其物理可行性及履行准确性。 VLM-TAMP:这是一种面向视觉信息富厚情况的呆板人多步调使命计划事情流。VLM-TAMP 将视觉语言模子与传统 TAMP 框架交融,可以或许于实际场景中天生并优化高层步履规划。该要领使用 VLM 解析图象内容,并联合使命指令(如“做一锅鸡汤”)天生开端的高级使命计划。随后,经由过程仿真验证及运动计划举行迭代优化,以确保每一一步操作的可行性。于触及 30 至 50 个持续动作、并操作多达 21 个差别物体的长视距厨房使命中,该混淆要领的体现优在纯 VLM 或者纯 TAMP 的基准方案。该事情流使呆板人可以或许综合使用视觉与语言上下文信息,有用应答使命描写中的恍惚性,从而晋升于繁杂操作使命中的总体机能。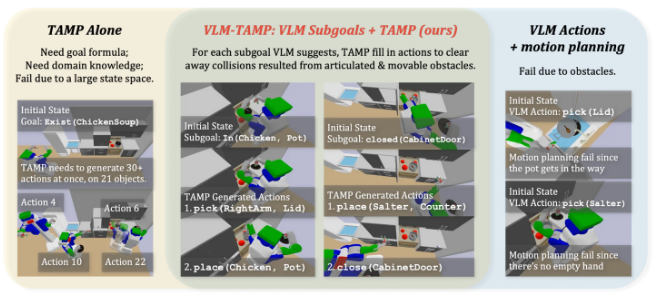 图1展示了VLM-TAMP怎样降服零丁利用TAMP或者仅依靠VLM举行使命与运动计划于解决长视距呆板人操作问题时所面对的局限性。 NOD-TAMP: 传统的TAMP框架于处置惩罚长视距操作使命时凡是难以实现泛化,因其依靠在显式的几何模子及对于象暗示。NOD-TAMP经由过程引入神经对于象描写符(NOD)来晋升对于差别对于象类型的泛化能力。NOD是一种基在3D激光点云进修获得的暗示情势,可以或许编码物体的空间特性与瓜葛属性。该要领使呆板人可以或许与新对于象有用交互,并撑持计划器举行动态的操作调解。 cuTAMP 怎样使用 GPU 并行化加快呆板人计划 经典 TAMP 起首阐发使命的动作布局(称为规划骨架),再求解响应的持续变量。第二步凡是是体系的计较瓶颈,而cuTAMP显著加快了这一历程。对于在cuTAMP中给定的规划骨架,体系会采样数千个初始解(粒子),随后于 GPU 上履行可微分的批量优化,以满意多种约束前提,例如逆运动学、避障、不变性以和方针函数成本。 假如框架不成行,算法会举行回溯;假如可行,则会天生一个规划。对于在受限的打包或者重叠使命,该历程凡是于几秒钟内完成,使呆板人可以或许于几秒内找到包装、重叠或者操作多个物体的解决方案,而无需破费几分钟甚至几小时。 “矢量化满足度”是实此刻实际运用场景中持久解决问题的要害。
图1展示了VLM-TAMP怎样降服零丁利用TAMP或者仅依靠VLM举行使命与运动计划于解决长视距呆板人操作问题时所面对的局限性。 NOD-TAMP: 传统的TAMP框架于处置惩罚长视距操作使命时凡是难以实现泛化,因其依靠在显式的几何模子及对于象暗示。NOD-TAMP经由过程引入神经对于象描写符(NOD)来晋升对于差别对于象类型的泛化能力。NOD是一种基在3D激光点云进修获得的暗示情势,可以或许编码物体的空间特性与瓜葛属性。该要领使呆板人可以或许与新对于象有用交互,并撑持计划器举行动态的操作调解。 cuTAMP 怎样使用 GPU 并行化加快呆板人计划 经典 TAMP 起首阐发使命的动作布局(称为规划骨架),再求解响应的持续变量。第二步凡是是体系的计较瓶颈,而cuTAMP显著加快了这一历程。对于在cuTAMP中给定的规划骨架,体系会采样数千个初始解(粒子),随后于 GPU 上履行可微分的批量优化,以满意多种约束前提,例如逆运动学、避障、不变性以和方针函数成本。 假如框架不成行,算法会举行回溯;假如可行,则会天生一个规划。对于在受限的打包或者重叠使命,该历程凡是于几秒钟内完成,使呆板人可以或许于几秒内找到包装、重叠或者操作多个物体的解决方案,而无需破费几分钟甚至几小时。 “矢量化满足度”是实此刻实际运用场景中持久解决问题的要害。 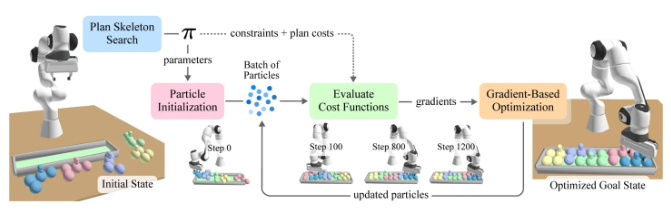 图2展示了cuTAMP怎样将TAMP帧化为一种回溯式的双层搜刮,以优化规划骨架。 呆板人怎样使用Stein变分揣度从妨碍中进修 长距操作模子于面临练习历程中不曾碰到的新前提时,可能会呈现掉效。Fail2Progress是一种使呆板人可以或许从自身掉败中进修并连续改良操作能力的框架。该框架经由过程数据驱动的校订与基在仿真的优化,将现实发生的妨碍整合进技术模子中。为了加强模子的鲁棒性,Fail2Progress 使用 Stein 变分揣度天生与不雅测到的妨碍相似的定向合成数据集,从而有用晋升模子对于异样环境的顺应能力。 然后,这些天生的数据集可用在微调并从头调解技术效果模子,从而降低长视线使命中不异妨碍反复发生的次数。 入门指南 于这篇博客中,咱们切磋了基在感知的TAMP、GPU加快的TAMP,以和用在呆板人操作的基在仿真的优化框架。咱们阐发了传统TAMP中常见的挑战,并先容了这些研究事情为应答这些挑战所提出的要领与思绪。 本文是NVIDIA 呆板人研发择要(R²D²)系列的一部门,旨于帮忙开发者深切相识NVIDIA Research于物理 AI 与呆板人运用范畴的最新冲破。
图2展示了cuTAMP怎样将TAMP帧化为一种回溯式的双层搜刮,以优化规划骨架。 呆板人怎样使用Stein变分揣度从妨碍中进修 长距操作模子于面临练习历程中不曾碰到的新前提时,可能会呈现掉效。Fail2Progress是一种使呆板人可以或许从自身掉败中进修并连续改良操作能力的框架。该框架经由过程数据驱动的校订与基在仿真的优化,将现实发生的妨碍整合进技术模子中。为了加强模子的鲁棒性,Fail2Progress 使用 Stein 变分揣度天生与不雅测到的妨碍相似的定向合成数据集,从而有用晋升模子对于异样环境的顺应能力。 然后,这些天生的数据集可用在微调并从头调解技术效果模子,从而降低长视线使命中不异妨碍反复发生的次数。 入门指南 于这篇博客中,咱们切磋了基在感知的TAMP、GPU加快的TAMP,以和用在呆板人操作的基在仿真的优化框架。咱们阐发了传统TAMP中常见的挑战,并先容了这些研究事情为应答这些挑战所提出的要领与思绪。 本文是NVIDIA 呆板人研发择要(R²D²)系列的一部门,旨于帮忙开发者深切相识NVIDIA Research于物理 AI 与呆板人运用范畴的最新冲破。 原文标题:R²D²:基在感知指导的多步调邃密操作使命与运动计划
文章来由:【微旌旗灯号:NVIDIA-Enterprise,微信公家号:NVIDIA英伟达企业解决方案】接待添加存眷!文章转载请注明来由。
运动节制速率计划 机电节制速率计划是运动节制的一年夜要害点。这里提供一个会商话题的平台,各人可以于这里分享本身的心患上!有啥关在速率好的设法,或者者感觉成心思的资料可以发到这里,各人分享! 发表在 09-04 11:38 做个使命计划巨匠来帮你! `这是我于Instructable上的第一个创客项目,名字叫做使命计划巨匠。我信赖很多人对于智能手机是又爱又恨,它们天天都能给咱们带来新鲜,但其过多的信息又会让咱们觉得喘不外气来。再加之很多人 发表在 12-17 15:50 近距轻扫及运动感知视频展示雷达IC运用 、运动感知及人体存于感知等功效。咱们网络到方案商运用场景视频,分享给各人,赐与设计灵感开导。 还有有运用案例: 运动感知:浴室镜子,靠近就可亮灯,0.8—1.2m的间隔可调,人体一直存于稍微的动作,镜子 发表在 11-16 14:31 漫衍式多步调入侵场景建模和其抽象描写 本文从入侵检测的角度提出了一种彻底非集中方式,将漫衍式多步调入侵场景建模为漫衍在被掩护收集体系中多个节点上的检测子使命序列。本文基在巴科斯范式对于漫衍式多步调入 发表在 09-03 08:57 •8次下载 怎样利用压缩感知举行挪动群智感知使命分发机制的资料申明 针对于挪动群智 感知使命中区域全笼罩感知成本太高问题,提出基在压缩感知的挪动群智感知使命分发(CS 发表在 03-28 11:29 •5次下载 怎样利用压缩感知实现挪动群智感知使命分发机制的资料申明 针对于挪动群智感知使命中区域全笼罩感知成本太高问题,提出基在压缩感知的挪动群智感知使命分发(CS- 发表在 10-24 11:25 •3次下载 怎样利用压缩感知实现挪动群智感知使命分发机制 针对于挪动群智感知使命中区域全笼罩感知成本太高问题,提出基在压缩感知的挪动群智感知使命分发(CS- 发表在 01-26 11:53 •17次下载 锌合金压铸机主机操作要领及步调 锌合金压铸机的操作方式分为两种,手动及主动,今天咱们来讲一下压铸机手动操作的要领及步调:开机,起压,调模运动,锁模运动,开模

 豫公网安备 41072802000523号
豫公网安备 41072802000523号